Arduino dengan Servo Motor
Menggunakan Arduino dengan motor servo kita boleh mengawal kedudukan acinya dengan tepat kerana motor servo berfungsi pada mekanisme maklum balas untuk menentukan kedudukan acinya. Kedudukan aci sentiasa diukur dengan potensiometer terbina dalam di dalam motor servo yang membandingkannya dengan kedudukan sasaran yang ditetapkan oleh mikropengawal (cth., Arduino). Dengan mengira ralat antara kedudukan sasaran dan kedudukan sebenar, mikropengawal melaraskan aci keluarannya untuk memadankannya dengan kedudukan sasaran. Keseluruhan sistem ini boleh digambarkan sebagai a sistem gelung tertutup .
Motor servo mengawal Arduino menggunakan isyarat PWM. Isyarat kawalan ini diberikan kepada pin kawalan motor servo. Lebar isyarat PWM menentukan kedudukan aci. Jadual di bawah memberikan ilustrasi kawalan kedudukan motor servo menggunakan isyarat PWM
| Lebar PWM (ms) | Kedudukan Aci (Sudut) |
|---|---|
| 1 ms | 0˚ darjah Min |
| 1.5ms | 90˚ darjah Neutral |
| 2ms | 180˚ darjah Maks |
Motor servo biasanya memerlukan nadi PWM setiap 20ms atau 50Hz. Kebanyakan motor servo RC boleh berfungsi dengan baik dalam julat 40 hingga 200Hz.
Pin Motor Servo
Kebanyakan motor servo yang digunakan dengan Arduino mempunyai tiga pin.
- tanah Motor servo mempunyai pin GND yang biasanya datang dalam warna hitam.
- Pin kuasa Pin 5v diperlukan untuk memberi kuasa kepada motor servo. Pin kuasa biasanya berwarna merah.
- Pin kawalan Pergerakan aci motor servo dikawal menggunakan pin kawalan. Pin ini disambungkan ke pin digital Arduino.
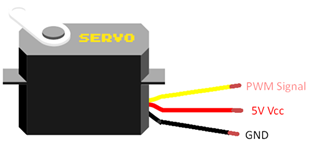
Motor servo mempunyai skema warna berbeza yang tersedia, tetapi berita baiknya ialah semua motor servo mempunyai pin biasanya dalam susunan yang sama, cuma pengekodan warna berbeza.
Servo wayar dengan Arduino
Kebanyakan motor servo berjalan pada 5V. Untuk kuasa servo dengan Arduino, kita perlu menyambungkan pin 5V Arduino ke pin kuasa servo. Arduino mempunyai julat terhad untuk melukis arus. Biasanya, satu atau dua motor boleh disambungkan ke Arduino. Untuk mengawal berbilang motor servo menggunakan Arduino kita mesti kuasa mereka menggunakan bekalan luaran.
Konfigurasi pin berikut harus diingat semasa menghidupkan servo:
| Pin Motor Servo | Pin Arduino |
|---|---|
| Kuasa (merah) | Pin 5V atau bekalan kuasa luaran |
| Tanah (hitam atau coklat) | Bekalan kuasa dan Arduino GND |
| Pin Kawalan (Kuning, oren atau putih) | Pin Digital Arduino |
Untuk menyambungkan motor servo dengan Arduino berikut dua konfigurasi adalah mungkin:
- Wayar menggunakan Arduino 5V Pin
- Wayar menggunakan bekalan luaran dengan Arduino
Wayar Menggunakan Arduino 5V Pin
Motor servo boleh dihidupkan menggunakan pin Arduino 5V tetapi satu perkara yang perlu diperhatikan ialah Arduino boleh memberikan arus maksimum 500mA kepada servo. Jika motor menarik arus melebihi had ini, ia akan menetapkan semula Arduino secara automatik dan ia mungkin kehilangan kuasa juga.
Berikut ialah perwakilan bergambar sambungan Arduino dengan motor servo:
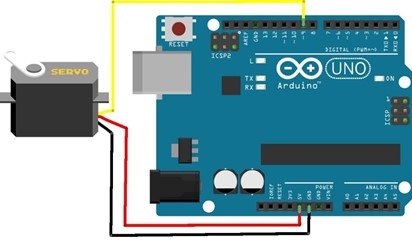
Di sini pin digital Arduino 9 disambungkan ke pin kawalan motor servo manakala pin kuasa dan GND servo masing-masing disambungkan ke pin 5V dan GND Arduino.
Wayar Menggunakan Bekalan Luaran dengan Arduino
Arduino boleh membekalkan arus terhad kepada motor servo itulah sebabnya kita perlu menyambungkan bekalan kuasa luaran. Menggunakan sumber kuasa yang berasingan untuk motor servo kita boleh menyambungkan seberapa banyak motor yang kita mahu dengan Arduino tetapi perlu diingat pin digital yang terdapat pada papan Arduino. Jika anda ingin menyambungkan berbilang motor servo, maka disyorkan untuk menggunakan perisai Arduino Mega atau Arduino yang boleh menyediakan lebih banyak pin untuk mengendalikan semua motor.
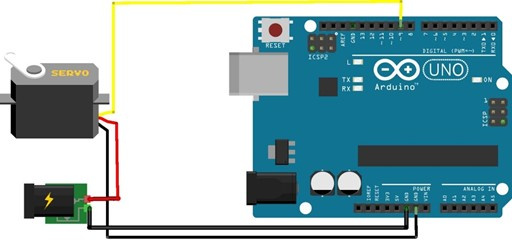
Di sini kuasa motor servo dan pin tanah disambungkan merentasi pin bekalan kuasa luaran manakala pin kawalan disambungkan ke pin digital Arduino seperti dalam konfigurasi di atas.
Kesimpulan
Motor servo ialah cara terbaik untuk mereka bentuk projek robotik. Disebabkan fleksibiliti mereka mengenai mekanisme kawalan, pengguna Arduino mendapat peluang untuk mereka bentuk projek pilihan mereka. Motor servo boleh disambungkan dengan Arduino menggunakan kuasa dan pin digitalnya. Sedangkan sentiasa mencari keperluan tenaga motor sebelum menyambungkannya ke Arduino. Untuk menyambungkan berbilang motor dengan Arduino anda perlu menggunakan bekalan kuasa luaran.